dichasus-005x Dataset: Indoor Non-Line of Sight, Single Room
Indoor, single-room dataset with co-located receivers and 50MHz bandwidth
50.000 MHz
Signal Bandwidth
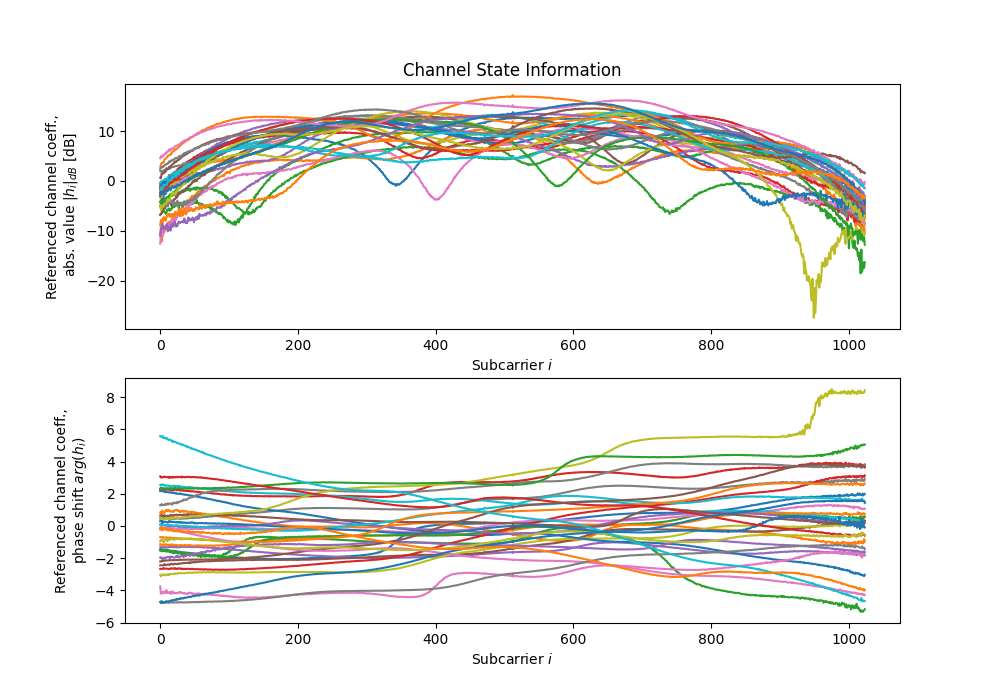
1024
OFDM Subcarriers
26161
Data Points
4992.7 s
Total Duration
6.9 GB
Total Download Size
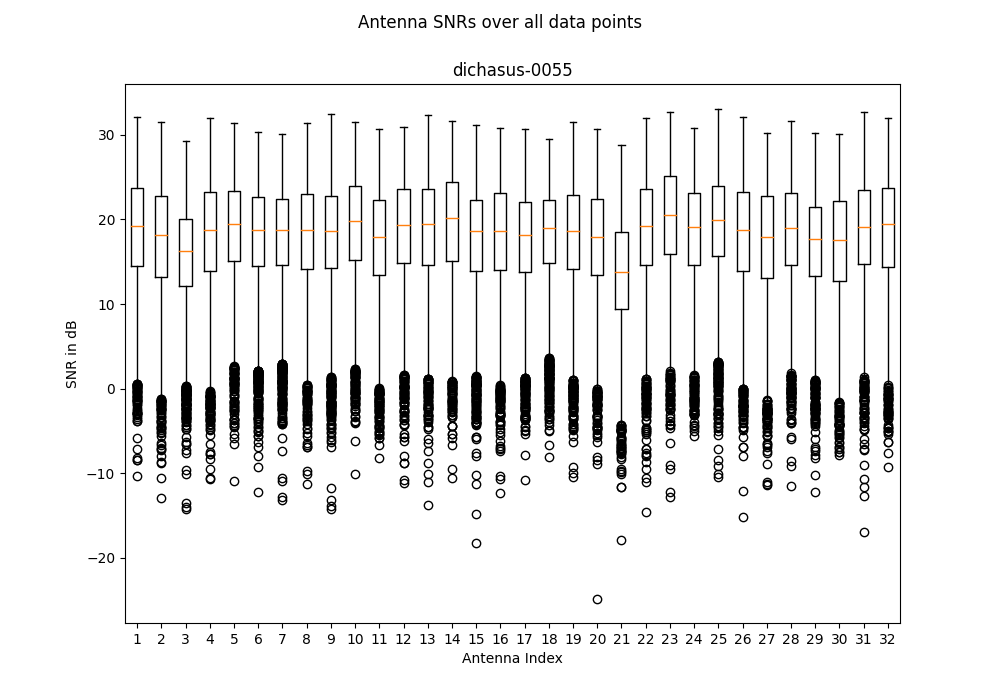
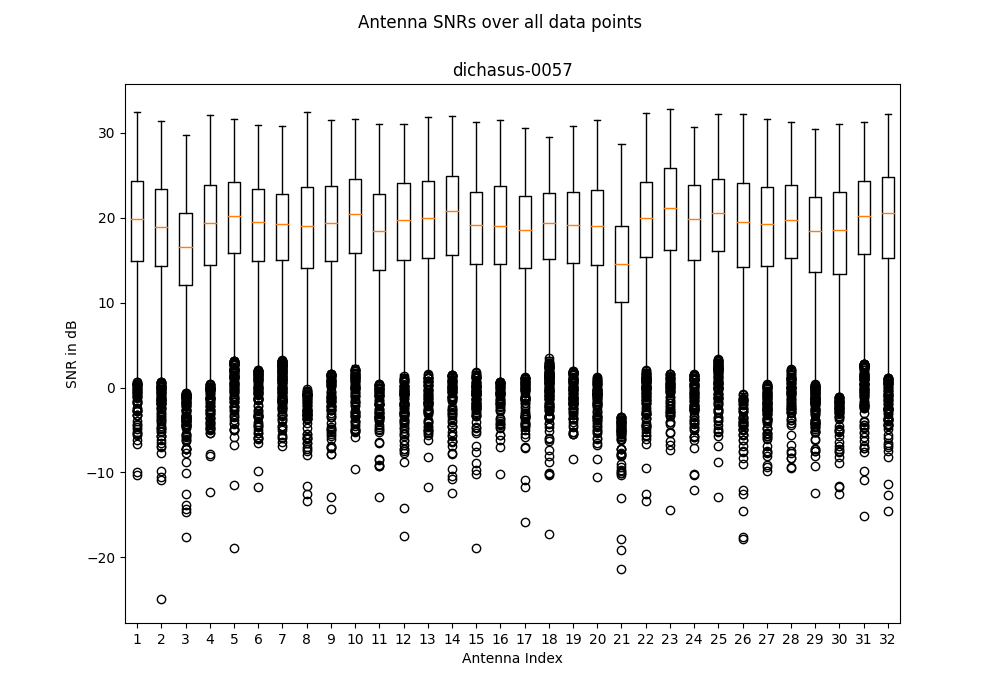
32
Number of Antennas
Indoor
Type of Environment
1.272000 GHz
Carrier Frequency
Co-Located
Antenna Setup
2D LiDAR
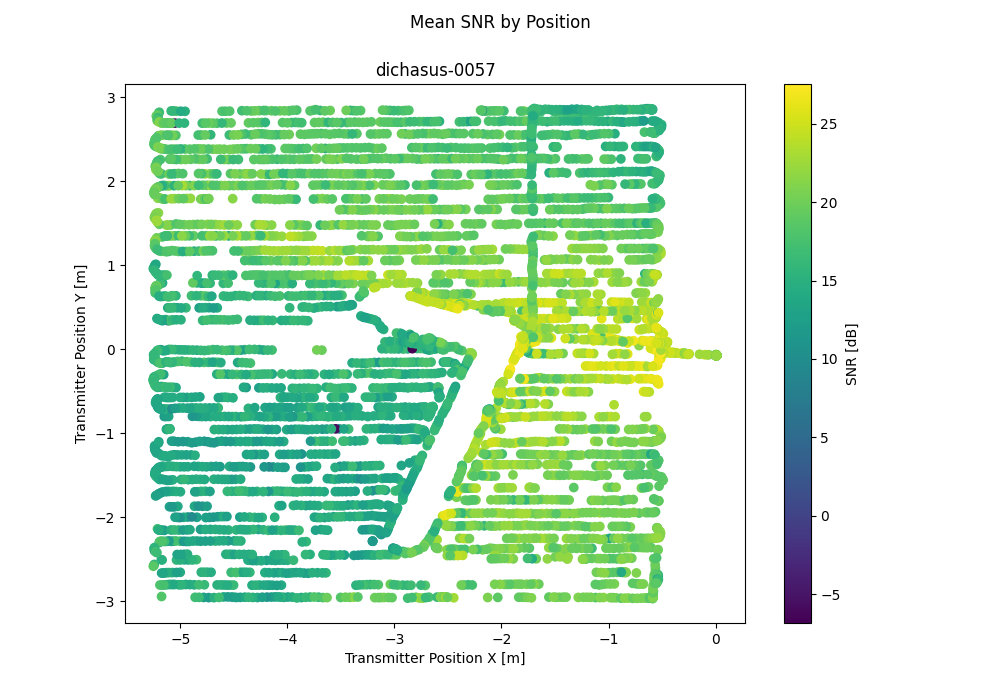
Position-Tagged
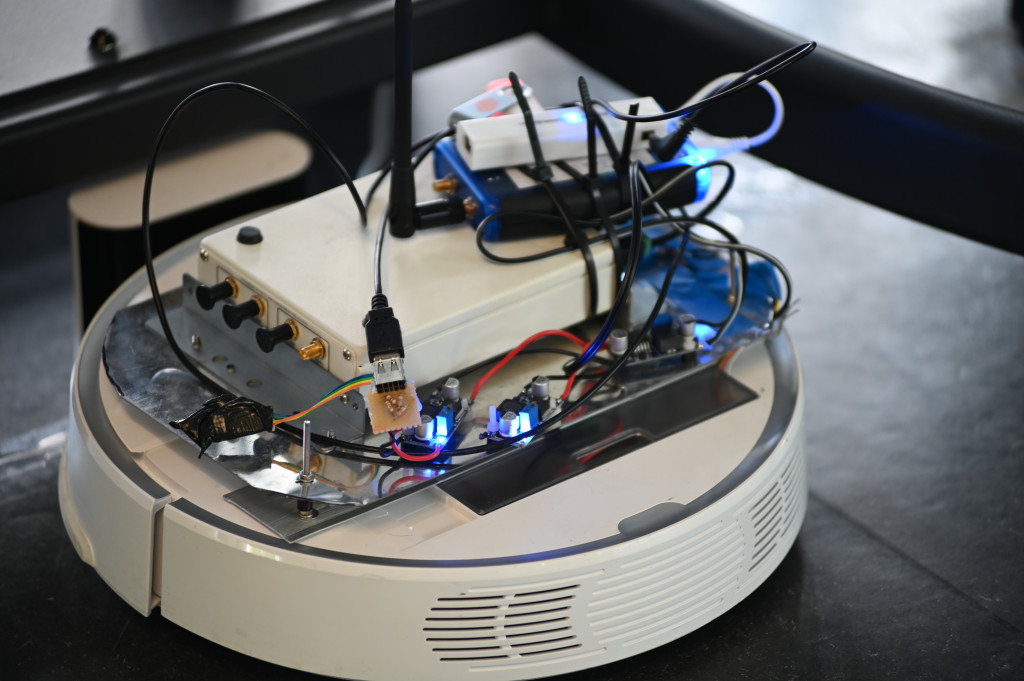
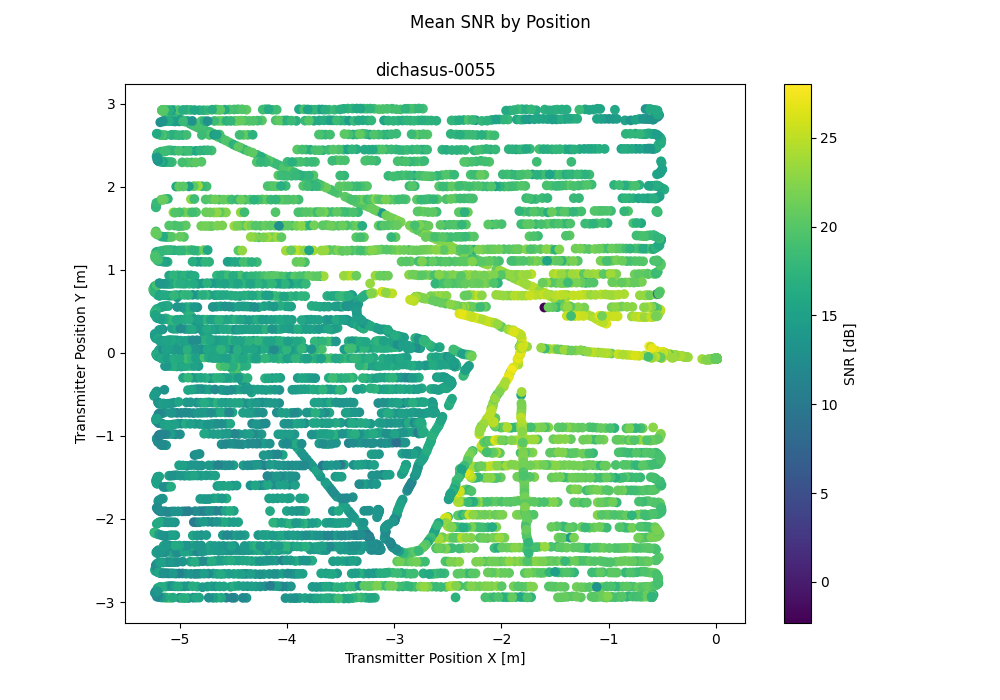
Experiment Setup

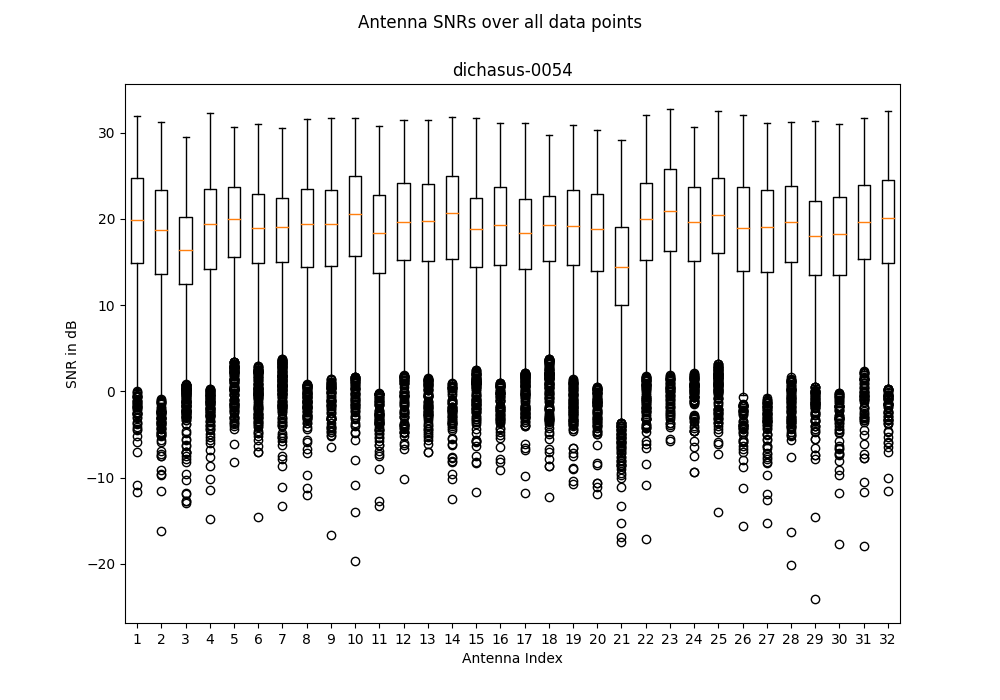
Data Analysis
Antenna Configuration
Antenna 1: Main Array
| 28 | 5 | 10 | 14 | 6 | 2 | 16 | 18 |
| 19 | 4 | 23 | 17 | 20 | 11 | 9 | 27 |
| 31 | 29 | 0 | 13 | 1 | 12 | 3 | 7 |
| 30 | 26 | 21 | 25 | 22 | 15 | 24 | 8 |
Python: Import with TensorFlow
#!/usr/bin/env python3
import tensorflow as tf
raw_dataset = tf.data.TFRecordDataset(["tfrecords/dichasus-0053.tfrecords", "tfrecords/dichasus-0054.tfrecords", "tfrecords/dichasus-0055.tfrecords", "tfrecords/dichasus-0056.tfrecords", "tfrecords/dichasus-0057.tfrecords"])
feature_description = {
"csi": tf.io.FixedLenFeature([], tf.string, default_value = ''),
"pos-lidar": tf.io.FixedLenFeature([], tf.string, default_value = ''),
"rot": tf.io.FixedLenFeature([], tf.float32, default_value = 0),
"snr": tf.io.FixedLenFeature([], tf.string, default_value = ''),
"time": tf.io.FixedLenFeature([], tf.float32, default_value = 0),
}
def record_parse_function(proto):
record = tf.io.parse_single_example(proto, feature_description)
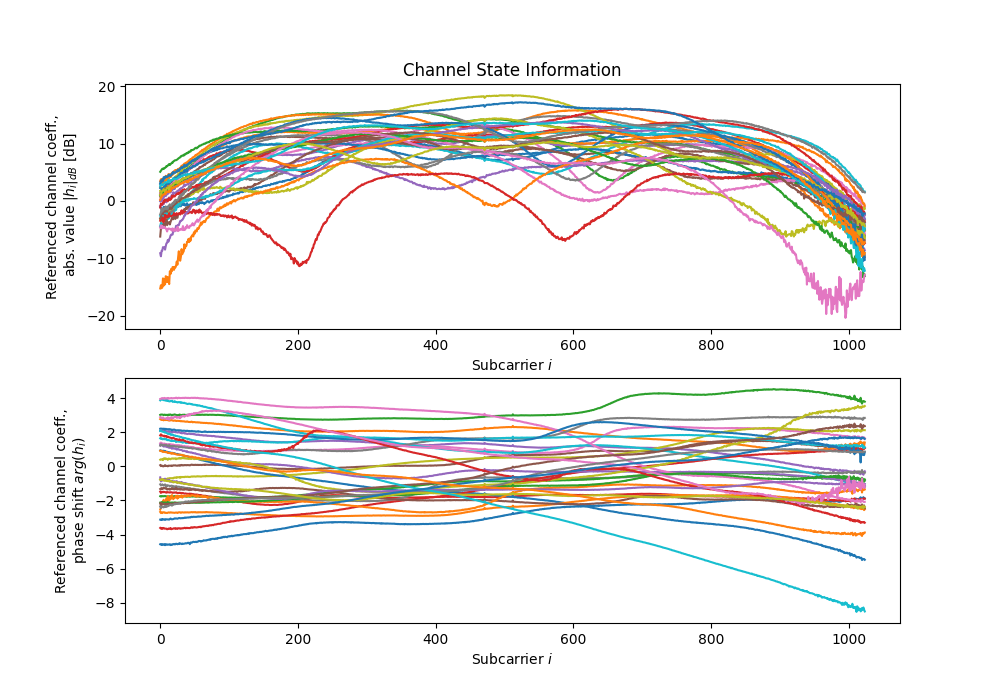
# Channel coefficients for all antennas, over all subcarriers, real and imaginary parts
csi = tf.ensure_shape(tf.io.parse_tensor(record["csi"], out_type = tf.float32), (32, 1024, 2))
# Position of transmitter determined by vacuum robot LIDAR, in meters (X / Y coordinates)
pos_lidar = tf.ensure_shape(tf.io.parse_tensor(record["pos-lidar"], out_type = tf.float64), (2))
# Rotation of robot relative to its initial parking position, in radians
rot = tf.ensure_shape(record["rot"], ())
# Signal-to-Noise ratio estimates for all antennas
snr = tf.ensure_shape(tf.io.parse_tensor(record["snr"], out_type = tf.float32), (32))
# Timestamp since start of measurement campaign, in seconds
time = tf.ensure_shape(record["time"], ())
return csi, pos_lidar, rot, snr, time
dataset = raw_dataset.map(record_parse_function, num_parallel_calls = tf.data.experimental.AUTOTUNE)
# Optional: Cache dataset in RAM for faster training
dataset = dataset.cache()Reference Channel Compensation
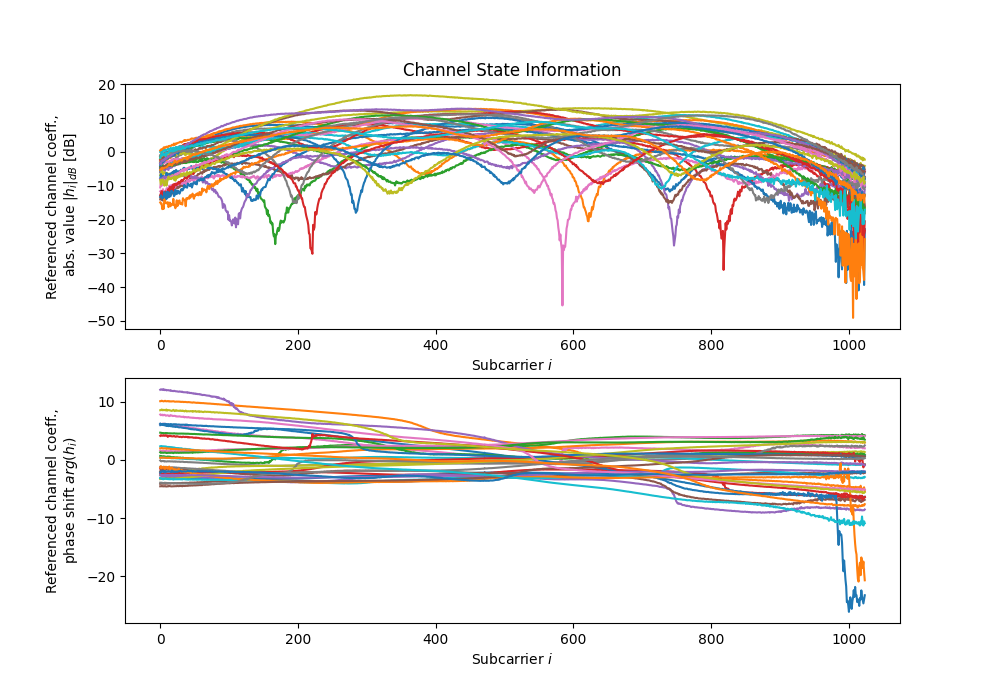
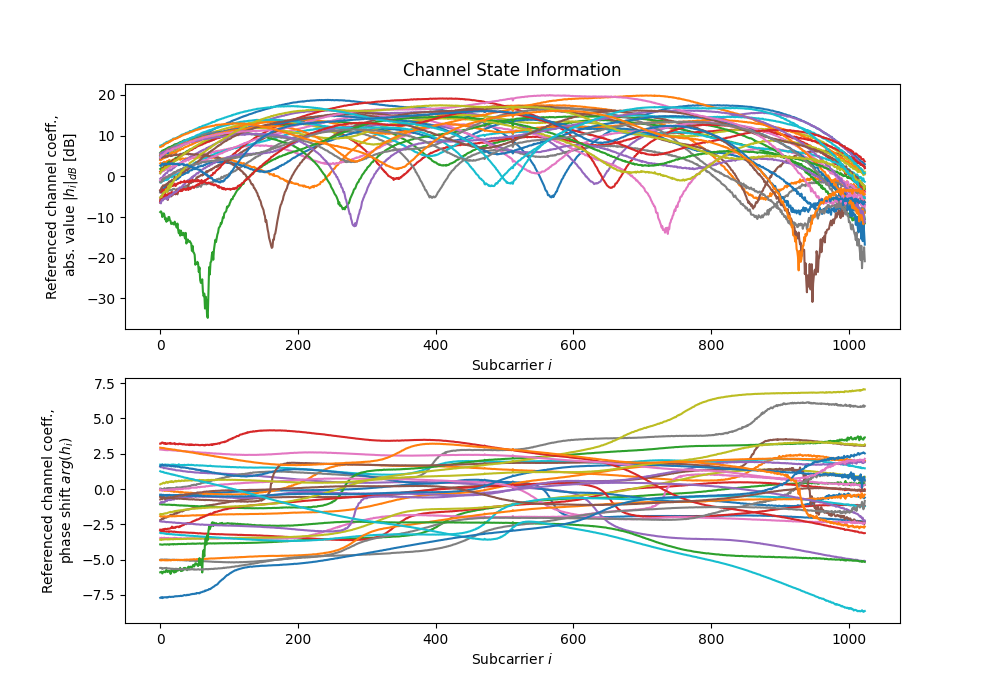
For this dataset, we are able to provide estimated antenna-specific carrier phase and sampling time offsets. These offsets occur due to the fact that the reference transmitter channel is not perfectly frequency-flat. To learn more about why these offsets occur and about their compensation, visit our offset calibration tutorial on this topic. Note that the estimates provided here are "best-effort" calculations. The phase and time offsets between antennas in the same array are usually very accurate, but for antennas that are spaced far apart, the results may be less precise. The offset are constant over the complete dataset.How to Cite
Please refer to the home page for information on how to cite any of our datasets in your research. For this dataset in particular, you may use the following BibTeX:
@data{dataset-dichasus-005x,
author = {Euchner, Florian and Gauger, Marc},
publisher = {DaRUS},
title = {{CSI Dataset dichasus-005x: Indoor Non-Line of Sight, Single Room}},
doi = {doi:10.18419/darus-2204},
url = {https://doi.org/doi:10.18419/darus-2204},
year = {2021}
}Download
This dataset consists of 5 files. Descriptions of these files as well as download links are provided below.
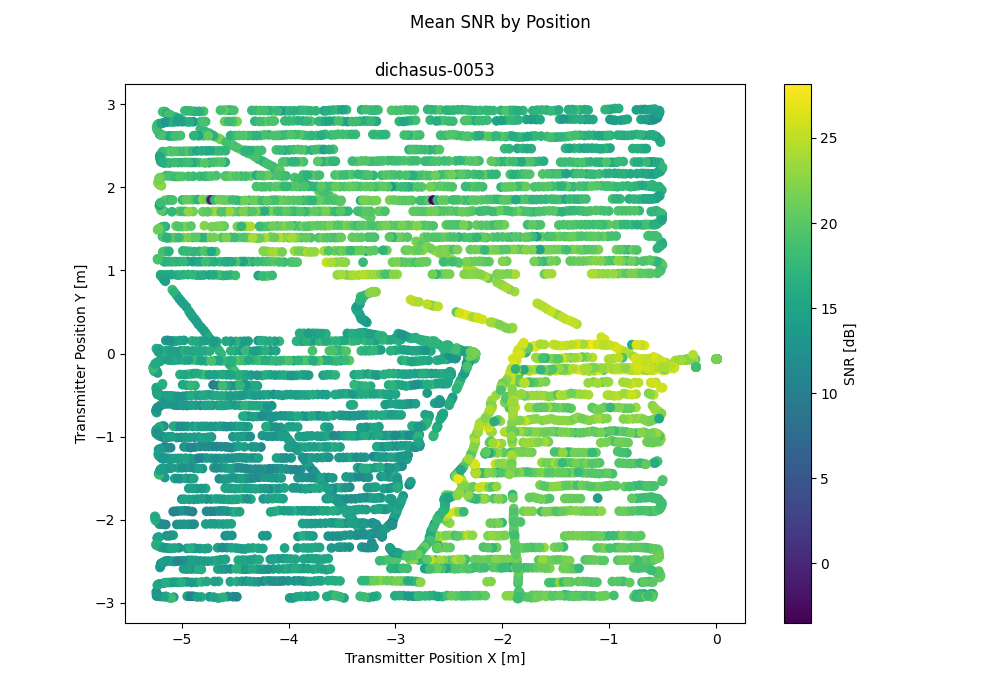
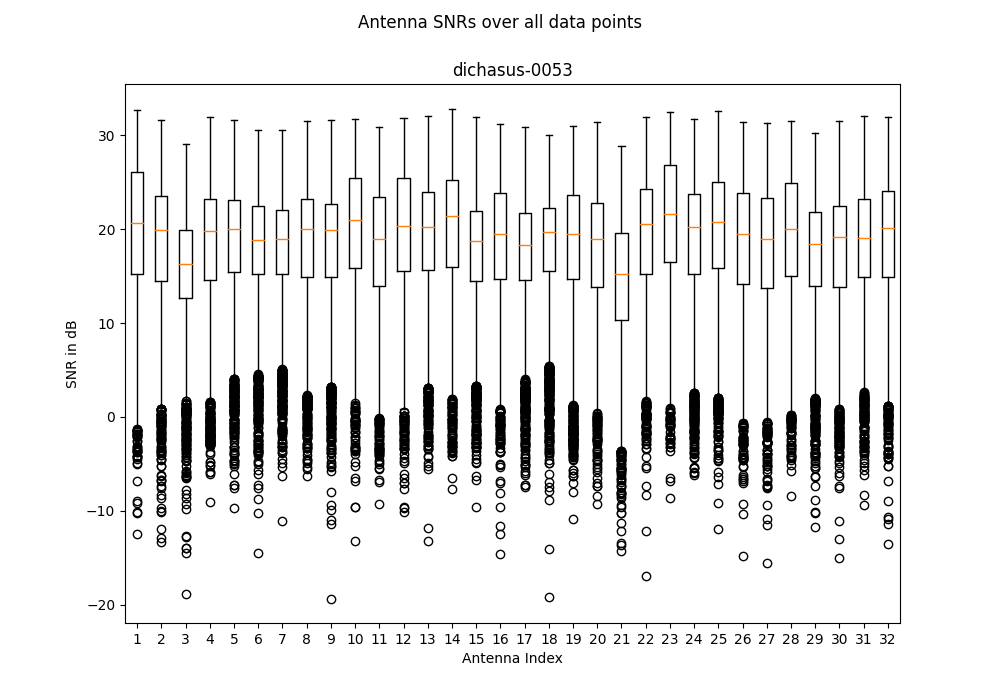
dichasus-0053
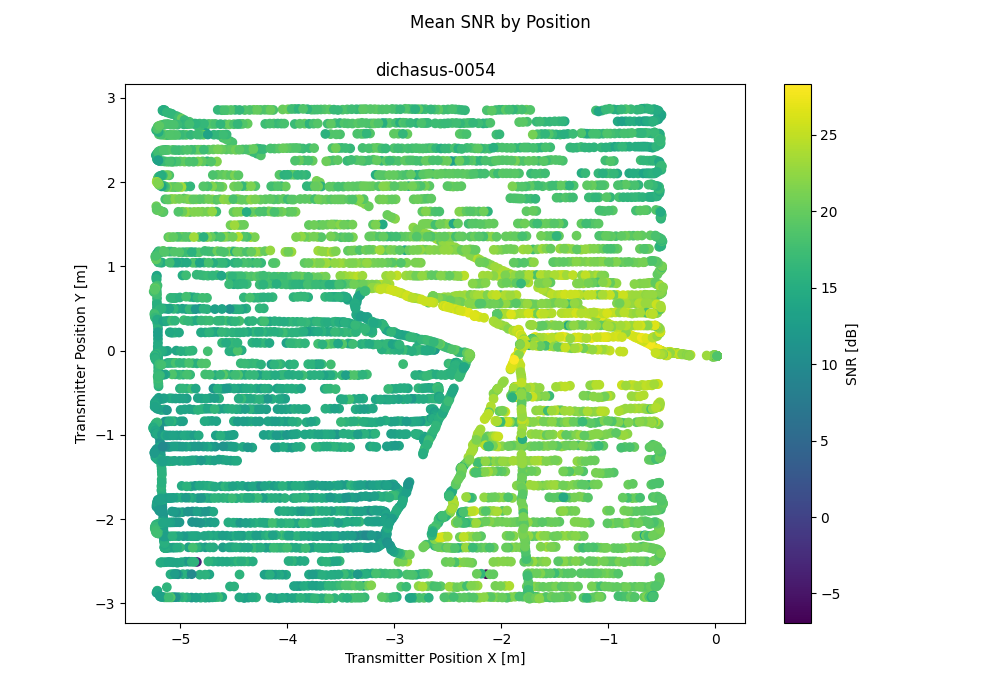
dichasus-0054
dichasus-0055
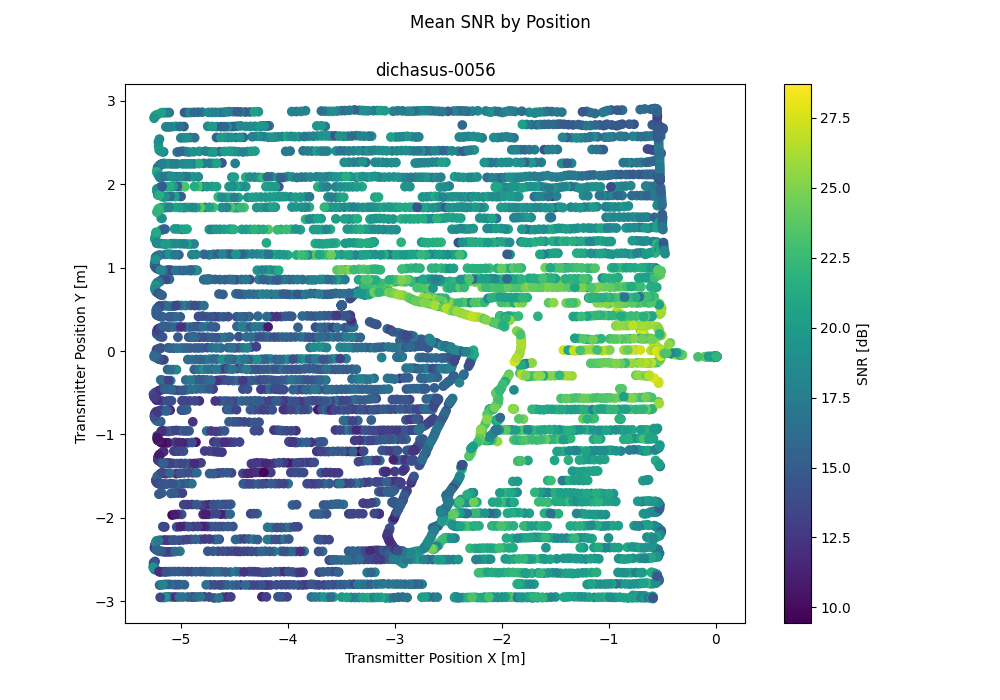
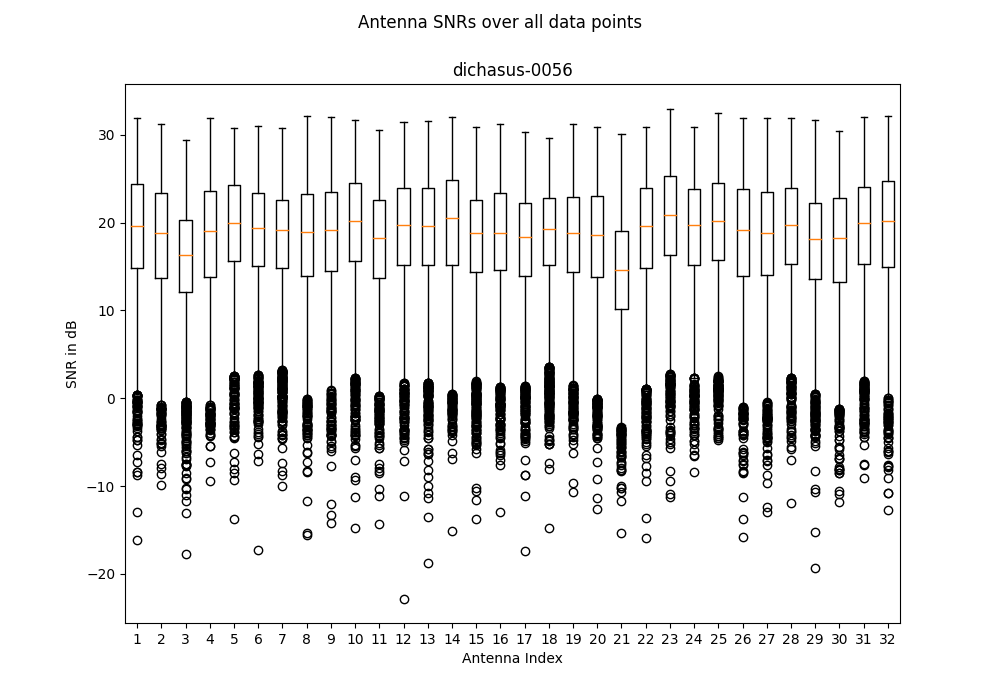
dichasus-0056
Derived Channel Statistics
Channel statistics such as delay spread, k-Factor and path loss exponent are a good way to characterize a wireless channel measurement and to parametrize a channel model. Using estimation algorithms contributed by Janina Sanzi, we automatically extract the following channel statistics from the measured datasets:
RMS Delay Spread
The delay spread of a wireless channel is inversely proportional to the channel's coherence bandwidth and indicates how "spread out" the lengths of the various multipath propagation paths are. For every datapoint, the delay spread can be characterized by its root mean square value and the resulting delay spreads can be plotted over the measurement area: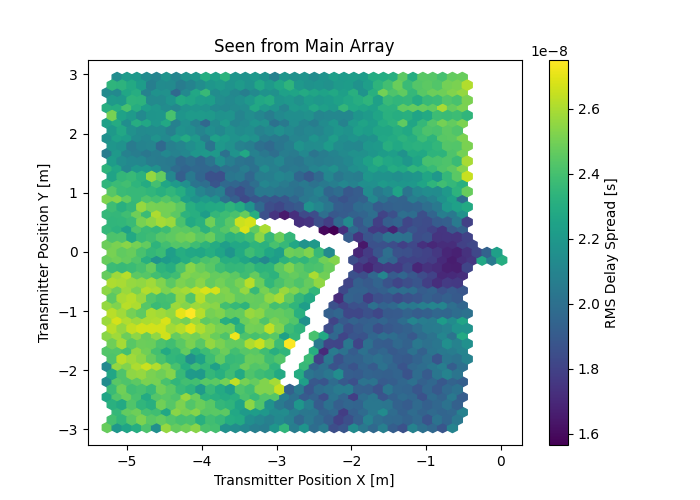
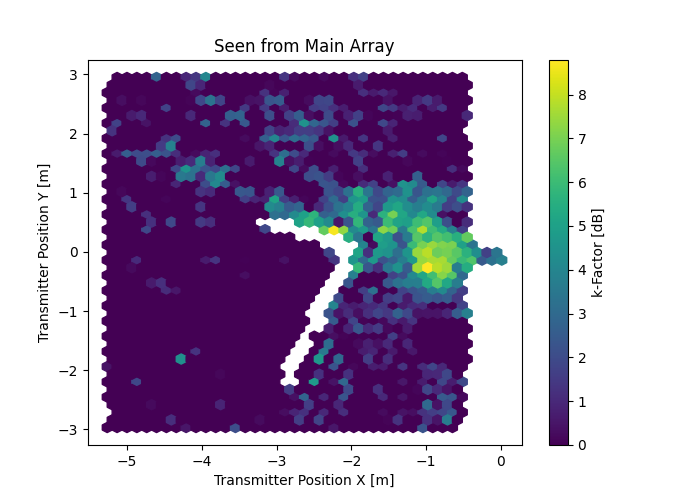
Rician K-Factor
The Rician K-factor is defined as the power ratio between dominant and diffuse component, usually expressed in decibels. We estimate the K-factor with a moment-method based on the distribution of of channel coefficient powers. The resulting K-Factors be plotted over the measurement area: